Events für Schüler - SONAR
Einführung
 |
||
| Schülerevents: | ||
SONAR ist ein Akronym und steht für Sound Navigation and Ranging, was zu deutsch soviel wie "Tonnavigation und Entfernungsmessung" bedeutet. Durch diese zwei Worte wird das generelle Funktionsprinzip eines SONAR-Systems bereits gut beschrieben. Im Falle des nachfolgend betrachteten aktiven SONAR-Systems werden durch Sendeelemente (sog. Projektoren) Schallwellen in das Medium Wasser übertragen. Treffen diese Schallwellen auf Objekte, beispielsweise Bojen, werden diese reflektiert und können durch Empfangselemente (sog. Hydrophone) aufgenommen werden.
Die Funktionsweise eines SONARs ist also sehr ähnlich jener eines RADARs (Radio Detection And Ranging). Aufgrund der physikalischen Eigenschaft von Wasser, dass elektromagnetische Wellen, wie sie beim RADAR Verwendung finden, unter Wasser stark gedämpft werden, wird auf Schallwellen zurückgegriffen. Auch die weiteren Ausbreitungseigenschaften von Schallwellen in Wasser führen durch Reflexionen an ungewollten Objekten und Grenzen des Mediums zu ungewollten Effekten (bspw. Mehrwegeausbreitung), welche in der Signalverarbeitung eines SONAR-Systems berücksichtigt werden müssen, um die Performanz des Systems zu optimieren. SONAR-Systeme haben eine Vielzahl möglicher Anwendungsgebiete, bspw. für die Kartographierung des Meeresbodens, zur Navigation oder der Detektion von Methangasblasen.
Technische Details und Konzepte
|
 |
Ein aktives SONAR-System, welches im Folgenden betrachtet wird, besteht aus Sicht der Signalverarbeitungskette aus sechs Hauptblöcken, welche in zwei Oberkategorien eingegliedert werden können. Zum Einen die Sendesignalverarbeitung, welche aus der Generierung von Signalen besteht (u.a. Sinus-Signale, sog. CW-Pulse) und dem Sendebeamforming (gerichtetes Senden des Signals in eine gewünschte Richtung).
Die Empfangssignalverarbeitung besteht aus vier Hauptblöcken - Empfangsbeamforming, Matched-Filterung, Detektion und Tracking. Das Empfangsbeamforming stellt ein Konzept der Signalverarbeitung dar und ermöglicht hierbei durch geeignete Kombination der Empfangssignale verschiedener Elemente eines Empfangsarray ein gerichtetes "Hören" und somit eine Schätzung der Einfallsrichtung des reflektierten Signals (aktives SONAR) bzw. generell des empfangenen Signals (auch für passives SONAR). Die Funktionsweise ist also grob ähnlich derer der menschlichen Ohren.
Das sog. Matched-Filter vergleicht die "Struktur" Sendesignal mit jener des Empfangssignals und "macht diese deutlich", es können somit die Laufzeiten zwischen Sendezeitpunkt und Empfangszeitpunk bestimmt werden. Durch die grobe Kenntniss der Schallgeschwindigkeit im Wasser (ca. 1500 m/s) kann wiederrum die Entfernung berechnet werden.
Im unten dargestelltem Beispiel kann die Entferung zwischen der Sende- und Empfangseinheit und dem Objekt mit der Formel: \begin{equation} d = \frac{c_{\text{w}} \cdot t}{2} \end{equation} berechnet werden. Mit einer Schallgeschwindigkeit im Wasser von \( c_{\text{w}} = 1500 \; \frac{\text{m}}{\text{s}} \) ergibt sich bei einer gemessenen Laufzeit von \( t = 2 \; \text{s} \) eine Distanz von \( d = 1500 \; \text{m} \).
In der Detektion und dem Tracking werden potentielle Ziel-Objekte erkannt, klassifiziert und durch das System verfolgt. Diese Ausgangsdaten werden schließlich in verschiedenen Plots visualisiert.
![]()
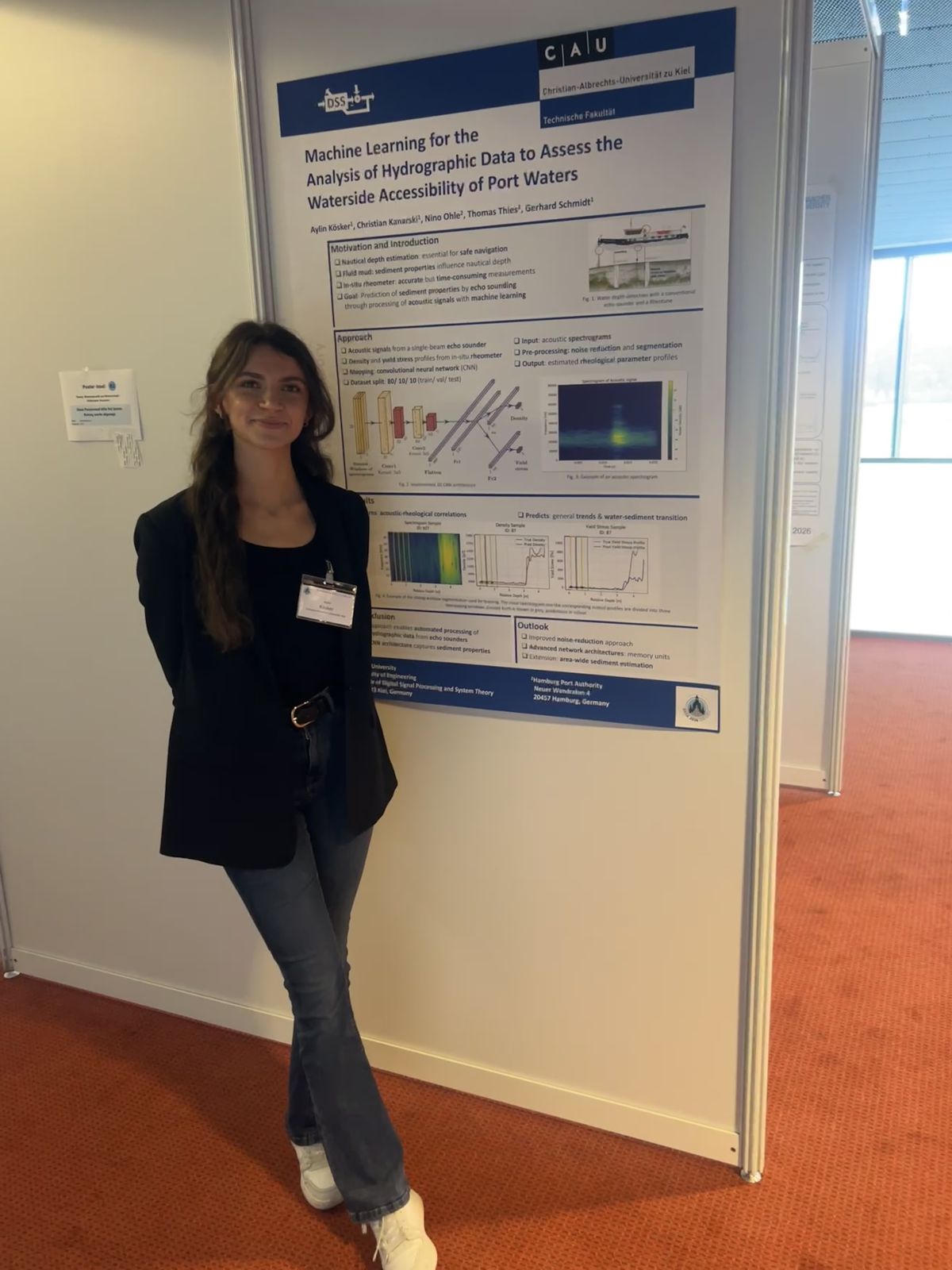 In March 2026, the DSS Chair attended the annual DAGA conference in Dresden. Thanks to the support of the GaS-Club, the student Aylin Kösker was given the opportunity to accompany the chair and participate in the conference from March 23rd to March 26th. As part of the daily poster sessions, she presented the results of her bachelor’s thesis “Machine Learning for the Analysis of Hydrographic Data to Assess the Waterside Accessibility of Port Waters” in the field of Underwater Acoustics. The thesis forms an important basis for an ongoing university research project on the acoustic analysis of sediment properties in harbor areas. The poster session enabled valuable discussions with researchers and conference participants from related research fields.
In March 2026, the DSS Chair attended the annual DAGA conference in Dresden. Thanks to the support of the GaS-Club, the student Aylin Kösker was given the opportunity to accompany the chair and participate in the conference from March 23rd to March 26th. As part of the daily poster sessions, she presented the results of her bachelor’s thesis “Machine Learning for the Analysis of Hydrographic Data to Assess the Waterside Accessibility of Port Waters” in the field of Underwater Acoustics. The thesis forms an important basis for an ongoing university research project on the acoustic analysis of sediment properties in harbor areas. The poster session enabled valuable discussions with researchers and conference participants from related research fields.