Cognitive MIMO Systems
 |
||
| Contents: | ||
Cognitive systems have drawn the attention of researchers since several years. Different approaches have been proposed for RADAR as well as communication applications and recently also for SONAR systems. In contrast to a classical SONAR system the operator does not need to adjust the system parameters to account for changes in the environment or consider the potential type of the target (e.g. mammal, diver, submarine, etc.) to achieve an increased performance of the system regarding detection and tracking. Cognitive systems are capable to achieve such a performance gain without the assistance of a human being but essentially due to a feedback loop of the receive signal processing to the transmit signal processing. The cognition of the system is achieved by a control unit which extracts the relevant information and adapts the parameters of the system according to a certain pattern.
This promising approach is extended by the idea of MIMO signal processing. The usage of this, in the field of SONAR systems novel technique, reveals a vast number of possible improvements which are subject to research at the chair of digital signal processing and system theory. As the chair has dedicated himself to real-time processing the above mentioned theoretical approaches are finally fit into our own real-time capable framework KiRAT.
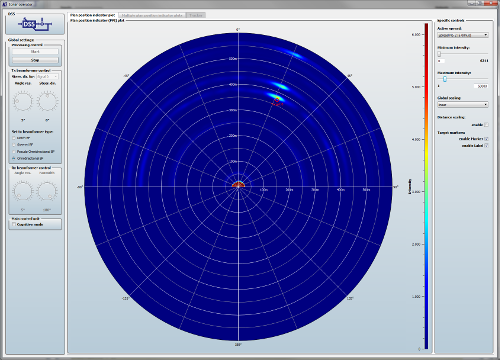 In this project, a MIMO system, consisting of a multitude of sending and receiving hydrophones as well as a PC-based signal processing hardware, is realized. In a first stage, the received hydrophone signals are processed by a multitude of beamformers. Each beamformer output signal is correlated with the send-signal sequence without modifications as well as with several temporally compressed and stretched versions. By analyzing the resulting three-dimensional correlation matrix using a CFAR detection algorithm, the angle(s) of arrival, the radial distance(s), and the radial target speed(s) can be estimated. In the picture on the top you see the graphical user interface that was implemented to visualize the detection results.
In this project, a MIMO system, consisting of a multitude of sending and receiving hydrophones as well as a PC-based signal processing hardware, is realized. In a first stage, the received hydrophone signals are processed by a multitude of beamformers. Each beamformer output signal is correlated with the send-signal sequence without modifications as well as with several temporally compressed and stretched versions. By analyzing the resulting three-dimensional correlation matrix using a CFAR detection algorithm, the angle(s) of arrival, the radial distance(s), and the radial target speed(s) can be estimated. In the picture on the top you see the graphical user interface that was implemented to visualize the detection results.
In order to improve the detection rate, a basic tracking algorithm based on Kalman filtering and multi-hypothesis tracking, is implemented. Tracked targets are distinguished between “interesting” and “non-interesting” (e.g. stationary, known) targets by a dedicated decision unit. In order to improve the detection of weak ”interesting” targets masked by strong ”non-interesting” targets, a sending beamformer is used to block the emission of sound into the direction of the ”non-interesting” targets. Due to the drawback of becoming blind towards some directions, blocking and omni-directional send modes are used alternatingly. In order to achieve a sufficient real-time performance, extensive frequency-domain processing and processor-specific code optimization are utilized.
Beside that multi-channel system described above we also investigate single-channel systems that are used for either classifying received sounds stemming from marine mamals or for speech communcation between e.g. divers.
Corresponding Publications:
C. Kanarski, B. Kaulen, F. Kühne, O. Wisch, K. Gussow, S. Christensen, G. Schmidt: Deep Reinforcement Learning for Autonomous SONAR Port Monitoring, Proc. DAGA, Germany, 2023
N. Neumann, B. Kaulen, S. Christensen, G. Schmidt: Deep Reinforcement Learning for Cognitive SONAR Systems, Proc. DAGA, Austria, 2021
T. Kaak, J. Abshagen, G. Schmidt: Real‐time Capable Multiple‐Input–Multiple‐Output SONAR Systems - An algorithmic Approach, IET Radar, Sonar & Navigation, DOI: doi.org/10.1049/rsn2.12091, 2021
B. Kaulen, A. Namenas, G. Schmidt: Entwurf und Implementierung einer kognitiven Steuereinheit für ein Echtzeit-MIMO-SONAR-System, Proc. DAGA, Germany, 2019
A. Namenas, T. Kaak, T. O. Wisch and G. Schmidt: Zieldetekion und Tracking mit einem Echtzeit-MIMO-SONAR-System, Proc. DAGA, Germany, 2018
T. Kaak, and G. Schmidt: An Introduction to Real-time Cognitive SONAR Systems Utilizing Novel MIMO Approaches, Proc. DAGA, Kiel, Germany, open access, 2017
T. Claussen, V. D. Nguyen, U. Heute, G. Schmidt: A Real-time Cognitive-Sonar System for Diver Detection, MTS/IEEE Oceans 2015, Oktober 19-22, 2015, Washington D.C., USA
T. Claussen, V. D. Nguyen: Real-time Cognitive Sonar System with Target-optimized Adaptive Signal Processing through Multi-layer Data Fusion, IEEE 2015 International Conference on Multisensor Fusion and Integration for Intelligent Systems, September 14-16, 2015, San Diego, USA
T. Claussen, V. D. Nguyen, U. Heute, G. Schmidt: A Real-time MIMO System for Sonar Applications, Proc. DAGA 2015, March 16-19, 2015, Nuremberg, Germany
 In March 2026, the DSS Chair attended the annual DAGA conference in Dresden. Thanks to the support of the GaS-Club, the student Aylin Kösker was given the opportunity to accompany the chair and participate in the conference from March 23rd to March 26th. As part of the daily poster sessions, she presented the results of her bachelor’s thesis “Machine Learning for the Analysis of Hydrographic Data to Assess the Waterside Accessibility of Port Waters” in the field of Underwater Acoustics. The thesis forms an important basis for an ongoing university research project on the acoustic analysis of sediment properties in harbor areas. The poster session enabled valuable discussions with researchers and conference participants from related research fields.
In March 2026, the DSS Chair attended the annual DAGA conference in Dresden. Thanks to the support of the GaS-Club, the student Aylin Kösker was given the opportunity to accompany the chair and participate in the conference from March 23rd to March 26th. As part of the daily poster sessions, she presented the results of her bachelor’s thesis “Machine Learning for the Analysis of Hydrographic Data to Assess the Waterside Accessibility of Port Waters” in the field of Underwater Acoustics. The thesis forms an important basis for an ongoing university research project on the acoustic analysis of sediment properties in harbor areas. The poster session enabled valuable discussions with researchers and conference participants from related research fields.